Hall Effect Angular Position Sensor

Hall Effect Position Sensors Specifications Hall Effect Angular Position Sensors

Angular Position Sensor Non Contact Hall Effect Analog Ritm Industryritm Industry

Angular Position Sensor An9 Series Cherry Non Contact Magnetic Hall Effect

Rotary Position Sensor Rs Parker Na

Angular Position Sensor Non Contact Hall Effect Analog Ritm Industryritm Industry

Angular Position Sensor Non Contact Hall Effect Ritm Industryritm Industry
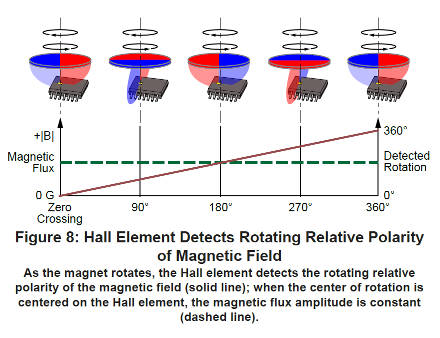
Hall effect position sensors detect speed position or direction of ferrous targets like shafts turbines and gears.
Hall effect angular position sensor.

Angular Position Sensor Contactless Hall Effect Analog Ritm Industryritm Industry
Magnetic Angle Sensors For Cars Have On Chip Processing

Angular Position Sensor Mlx90333 Melexis Non Contact Hall Effect Analog

Angle Measurement Using A Miniature Hall Effect Position Sensor Semantic Scholar
Source : pinterest.com
